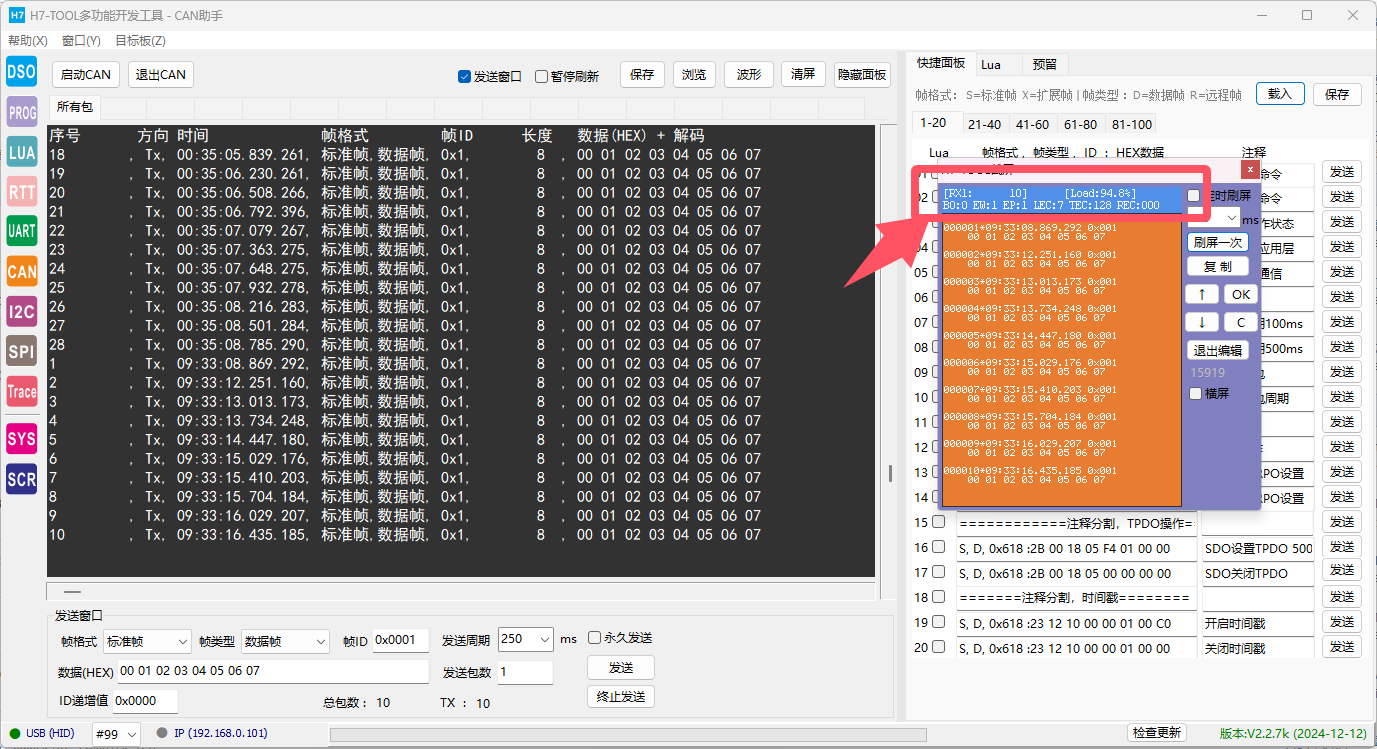
本来这几天就可以发布2.27版固件了,只差将CAN助手的负载率,CAN错误状态信息和CAN发送成功标识在上位机上加个展示控件即可,手持显示屏端早就做好了。
当前得等我们上位机开发人员将这个控件整合上就可以发布了
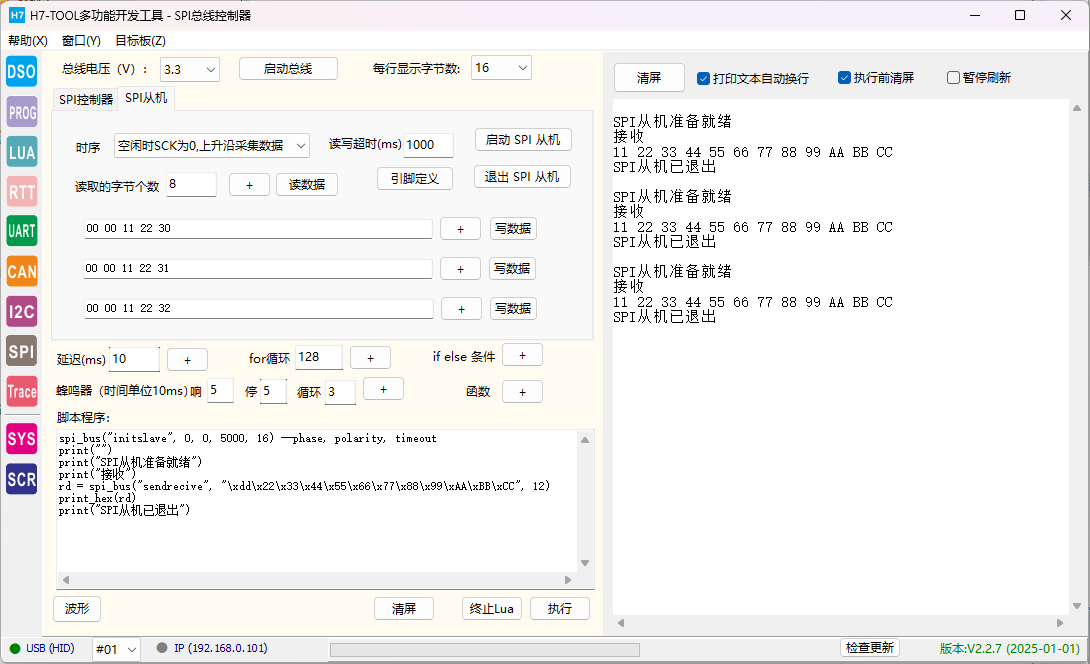
所以这两天就又把客户之前建议的SPI主从机功能增加了16bit通信方式,之前仅支持8bit的。下面是一个两个TOOL的SPI控制器做16bit通信,全双工方式。
主机:
[Lua] 纯文本查看 复制代码 spi_bus("init", 5, 0, 0, 16)
rd = spi_bus("sendrecive", "\x11\x22\x33\x44\x55\x66\x77\x88\x99\xAA\xBB\xCC", 12)
print_hex(rd)

从机:
[Lua] 纯文本查看 复制代码 spi_bus("initslave", 0, 0, 5000, 16) --phase, polarity, timeout
print("")
print("SPI从机准备就绪")
print("接收")
rd = spi_bus("sendrecive", "\xdd\x22\x33\x44\x55\x66\x77\x88\x99\xAA\xBB\xCC", 12)
print_hex(rd)
print("SPI从机已退出")
| 







 发表于 2024-12-28 00:54:38
发表于 2024-12-28 00:54:38
 发表于 2024-12-28 10:48:12
发表于 2024-12-28 10:48:12
 楼主
楼主
{kind=link}
{kind=link}