|
|


1Ўў°ІЙӯГА°лөјМеНЖіцА¶САөН№ҰәД¶аҙ«ёРЖчЖҪМЁЈ¬К№ГвөзіШIoT іЙОӘПЦКө
https://www.onsemi.cn/PowerSolutions/newsItem.do?article=4309
ГвөзіШЈ¬ГвО¬»ӨТ»ЦұКЗОпБӘНшЙијЖЦРөДТ»ёцЦШТӘН»ЖЖөгЎЈ¶ФҙЛЈ¬°ІЙӯГАНЖіцБҪҝоЙијЖМЧјю
ЈЁ1Ј©М«СфДЬөзіШ№©өзМЧјю
ёГЖҪМЁҪбәПRSL10 SIPЎўМ«СфДЬөзіШәНBoschөДРн¶аөН№ҰәДҙ«ёРЖчЈ¬°ьАЁBME280¶а№ҰДЬТ»Ме»·ҫіҙ«ёРЖчЈЁС№БҰЎўОВ¶ИЎўКӘ¶ИЈ©әНBMA400і¬өН№ҰәД3ЦбјУЛЩ¶ИјЖЈ¬К№ҝӘ·ўИЛФұәНЦЖФмЙМҝЙҙҙҪЁНкХыөДIoTҪЪөгЈ¬НкИ«УЙҝЙФЩЙъДЬФҙ»тҙУҙ«ёРЖчЦЬО§ІЙјҜөДДЬБҝ№©өзЎЈ
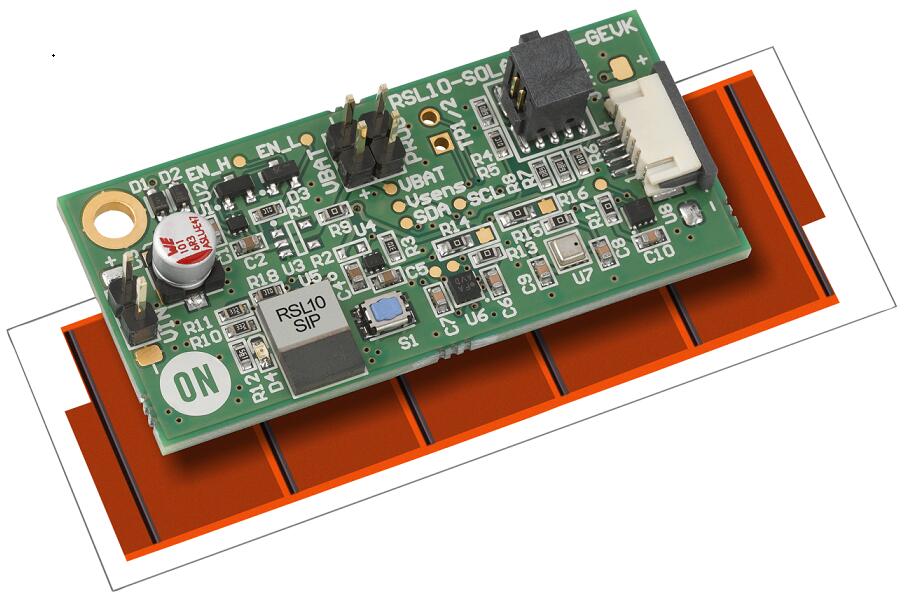
ЈЁ2Ј©»№УРТ»ҝоДЬБҰЛСјҜ·Ҫ°ёМЧјюЈ¬УЙ°ІЙӯГАәНІЙ°ЈжЪҝӘ·ўөДА¶САҝӘ№ШЈ¬А¶САГҝТ»ҙ«КдРЕәЕЦ»ПыәД20ОўҪ№(ҰМJ)
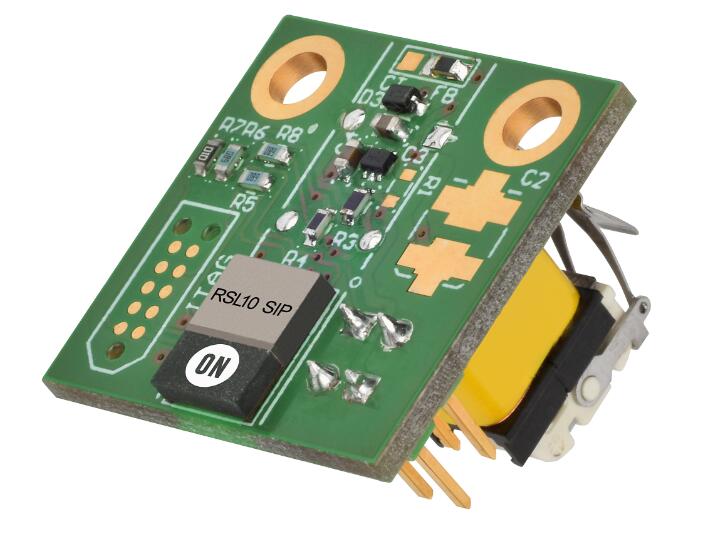
ёГҝӘ№ШҪ«ДЬБҝҙУ¶ҜДЬЧӘ»»ОӘөзҙЕДЬЈ¬ІўҙўҙжЖрАҙ№©RSL10 SIPК№УГЎЈ¶шУГ»§ГҝҙО°ҙПВј°ЛЙҝӘ°ҙЕҘЈ¬ҝЙТФЛСјҜ300ҰМJДЬБҝЎЈ

№ШУЪ°ІГАЙӯ°лөјМеНЖөДА¶САSIP--RSL 10ПөБР
јҙК№КЗЧоУРҫӯСйөДУІјю№ӨіМКҰЈ¬ПөНіј¶ЙдЖөЙијЖТІКЗТ»ёцёҙФУөД№эіМЈ¬РиТӘҫЯұёМмПЯСЎФсЎўНшВзЖҘЕдәНPCBІјҫЦөДЦӘК¶ЎЈТ»ө©ЙијЖБЛУҰУГЈ¬ҫНұШРлІвКФІўМбҪ»ТФ·ыәП№ъјКОЮПЯұкЧјЈ¬ИзГА№ъFCCЎўјУДГҙуICЎўЕ·ЦЮCEөИЎЈ
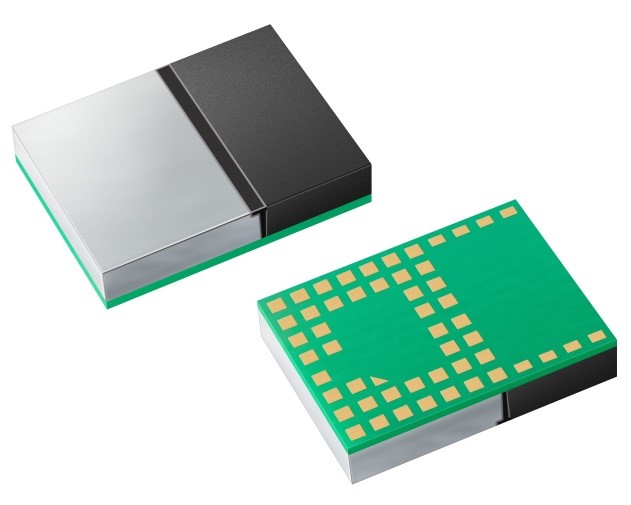
јшУЪҙЛЈ¬°ІГАЙӯ°лөјМеНЖА¶САSIP·Ҫ°ёRSL 10ДЈҝйЈ¬јҜіЙөДМмПЯЈ¬ОЮРиИОәО¶оНвөДRFЙијЖЈ¬ҙуҙујхЙЩБЛЙПКРКұјдЎЈ
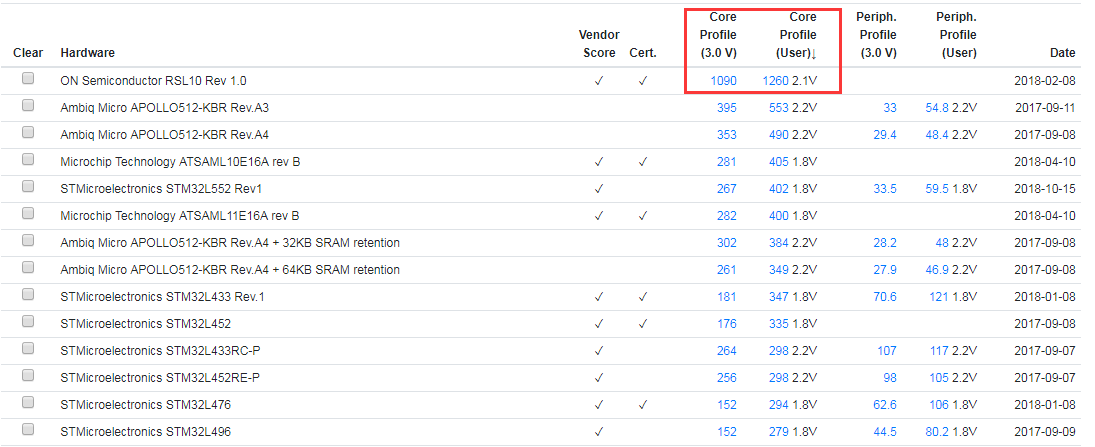
RSL10ПөБРЖҫҪиА¶СА5ҝЙКөПЦ2ХЧО»ГҝГл(Mbps)өДЛЩ¶ИУлТөҪзЧоөН№ҰәДЈ¬МṩПИҪшөДОЮПЯ№ҰДЬЈ¬¶шІ»У°ПмөзіШК№УГКЩГьЎЈRSL 10ФЪЙо¶ИЛҜГЯДЈКҪПВөД№ҰәДҪц62.5ДЙНЯ(nW)Ј¬·еЦөҪУКХ№ҰәДҪц7әБНЯ(mW)ЎЈRSL10өДёЯДЬР§ЧоҪь»сEEMBC ULPMark™СйЦӨЈ¬іЙОӘ»щЧјК·ЙПКЧҝоН»ЖЖ1,000 ULP MarkөДЖчјюЈ¬Core Profile·ЦКэёЯіцЗ°РРТөБмРдБҪұ¶ТФЙПЎЈ
2ЎўТ»ҝоИнУІјюИ«ҝӘФҙөДЦЗДЬРЎКЦұнЙијЖ
ҝӘФҙөШЦ·Јә
https://github.com/S-March/smarchWatch_PUBLIC/
УІјюЕдЦГЈә
ЦчҝШУГөДDialog Semiconductor DA14683Ј¬ҙшBLE5.0
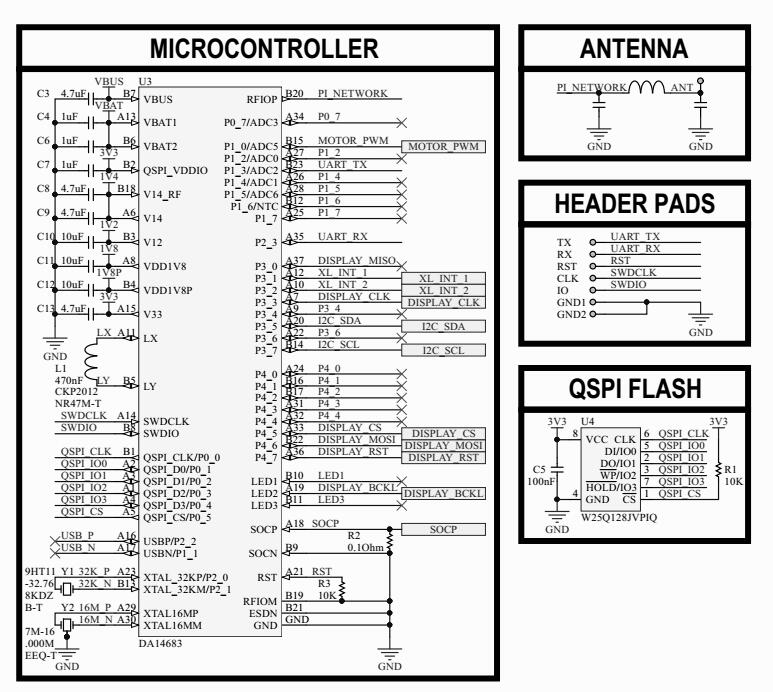
Р§№ыЈә
https://imgur.com/a/FSBwD3g





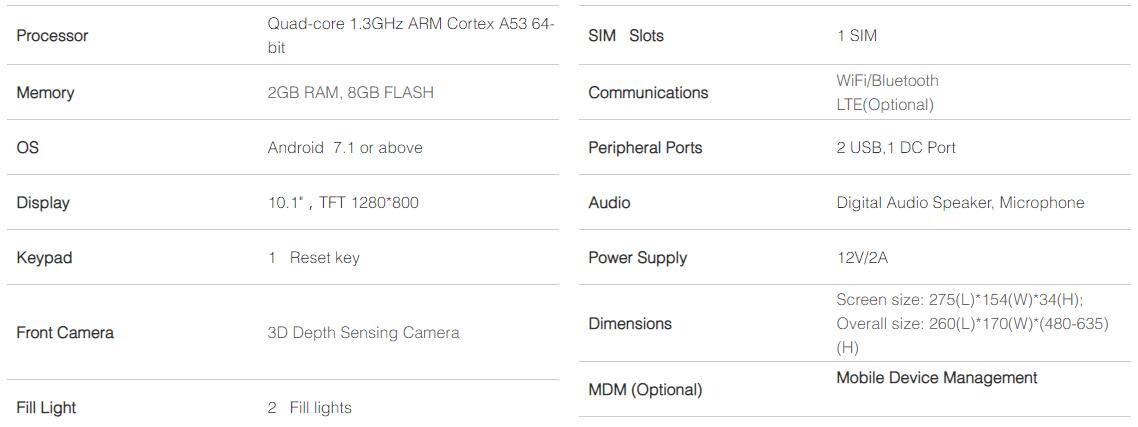
3Ўў Ц§ё¶ұҰPOS»ъУІјюЕдЦГ
ҪсДкДкіхҝӘКјЈ¬Ц§ё¶ұҰөДРЎpos»ъҝӘКјіцПЦФЪҙуҪЦРЎПпөДРЎі¬КРЈ¬РЎ·№№ЭЎЈ
іэБЛіЈУГөД¶юО¬ВлЦ§ё¶Ј¬¶аБЛёцЛўБіЦ§ё¶Ј¬ҪсМмМШөШФЪі¬КРАпГжІвКФБЛПВЈ¬ҪцҪцРиТӘ°у¶ЁПВКЦ»ъЈ¬ТФәуЦұҪУЛўБіҫНРРЈ¬өДИ·КЗ·ҪұгЈ¬І»УГҙшКЦ»ъБЛЎЈ
НнЙПҫНЛСјҜБЛПВПа№ШУІјюЧКФҙЈ¬ПВГжКЗДЗЦЦРЎёцН·өДPOS»ъЈ¬»щұҫЗйҝцИзПВЈ¬ГІЛЖКЗБӘ·ўҝЖMT6735ПөБР·Ҫ°ёЈ¬УІјюУЙөЪИэ·ҪЙъІъЈ¬ЧФјәФЩЕдМЧAndroid·ҪГжөДИнјюЦ§іЦЎЈ

4ЎўST·ўөДSTM32CubeIDEјтөҘЙПКЦКУЖө
https://v.qq.com/x/page/j0867kmpa79.html
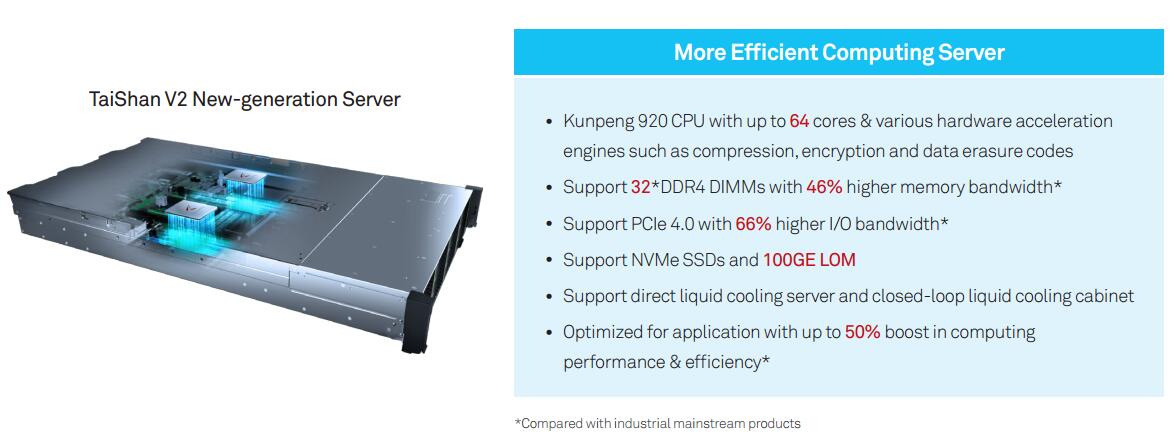
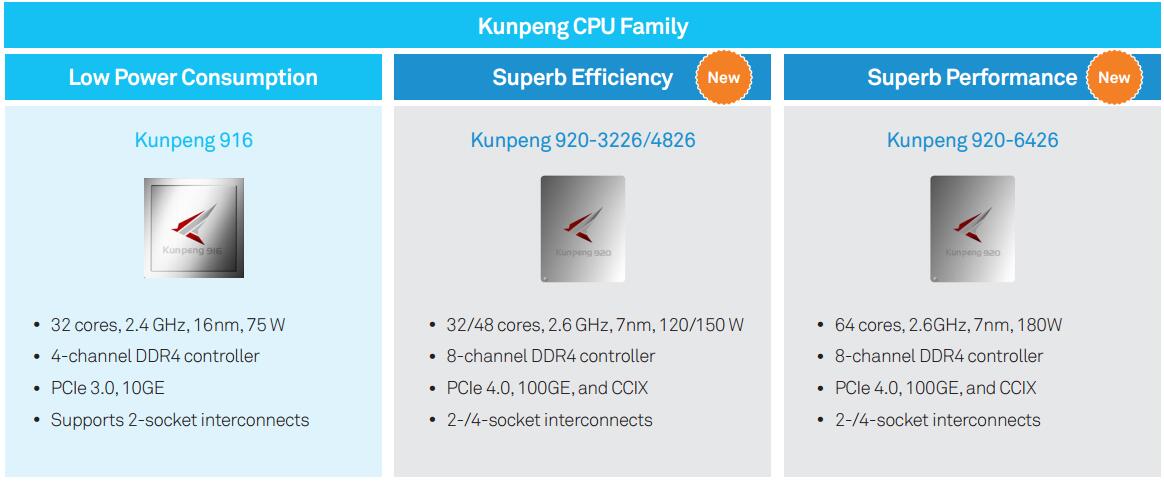
5Ўў»ӘОӘМ©ЙҪ·юОсЖч¶юҙъЈ¬»щУЪИҘДкДкД©НЖіцөДцпЕф920
2019»ӘОӘЦЗДЬјЖЛг»ъҙу»бәјЦЭХҫХ№КҫБЛ¶юҙъМ©ЙҪ·юОсЖчЎЈ
psЈәөұЗ°·юОсЖчБмУт»№КЗX86өДМмПВЈ¬TOP500өДМмМЭЕЕГыЦРҪцТ»ҝйКЗ»щУЪARMәЛөДЈ¬ARM·юОсЖч»№УРәЬіӨөДТ»¶ОВ·ТӘЧЯЎЈ
М©ЙҪ¶юҙъЈә
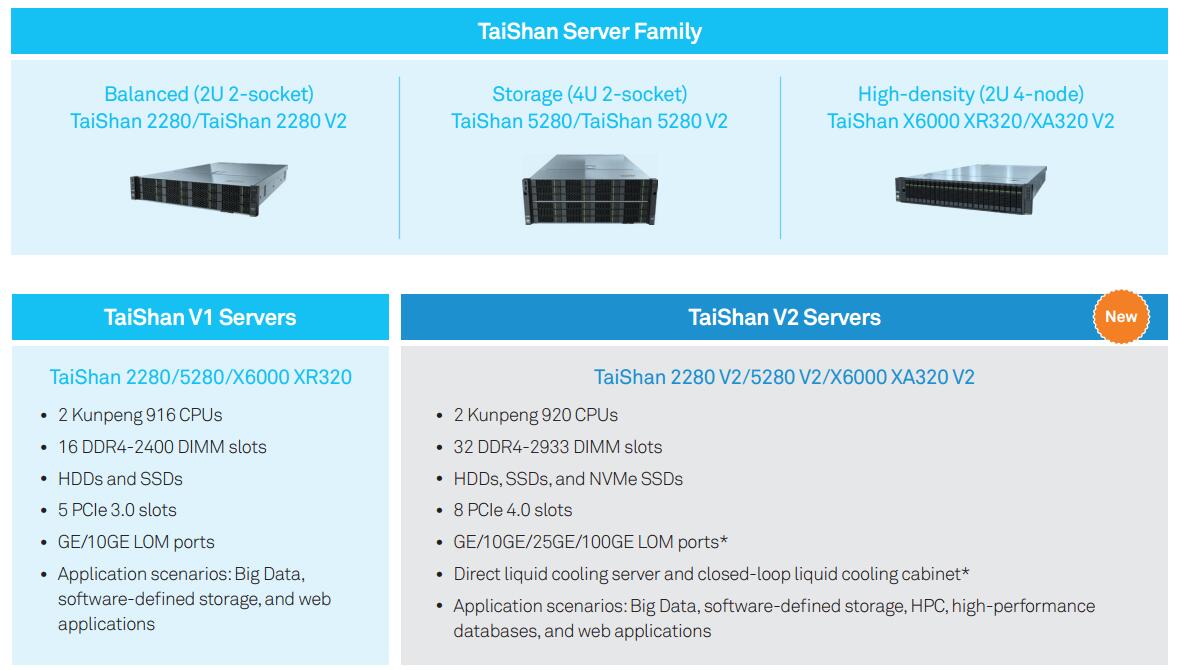
цпЕфјТЧеЈә
·юОсЖчР§№ыЈә
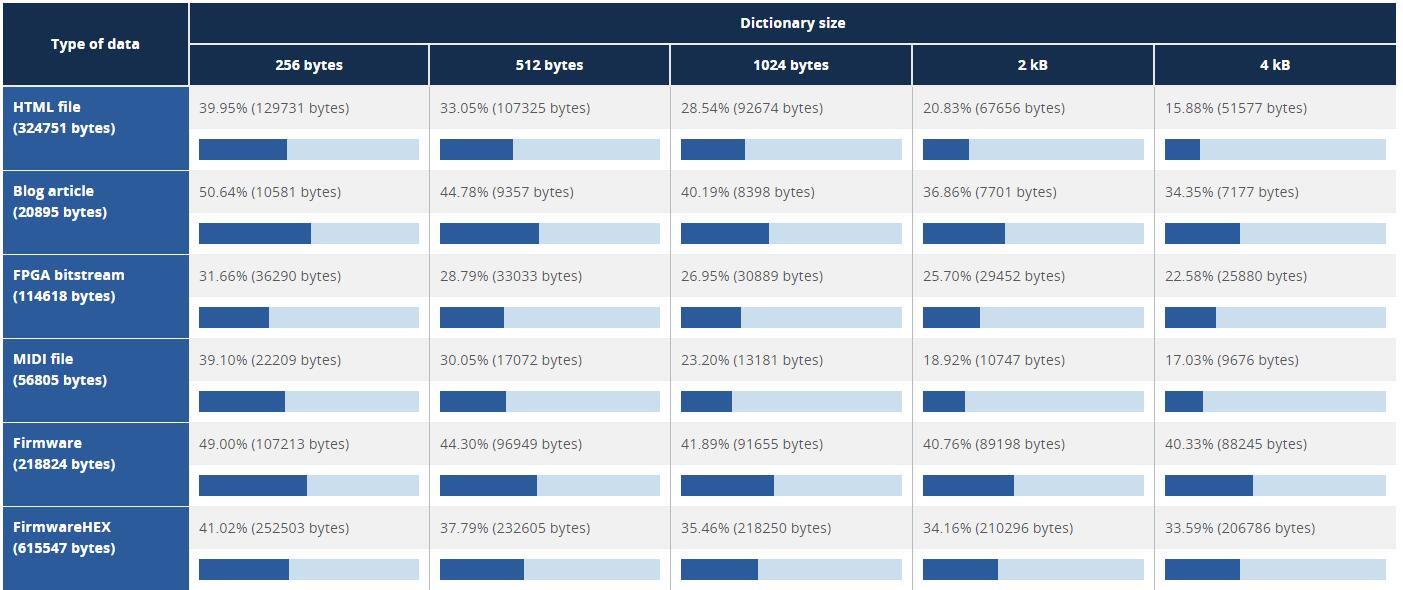
6Ўў SEGGERНЖіцРВөДС№ЛхЧйјюemCompress-ToGoКУЖөҪйЙЬ
КУЖөЈәhttps://v.qq.com/x/page/z0867uqlkug.html
ХвКЗТ»ҝоОӘЧКФҙКЬПЮПөНіБҝЙн¶ЁЦЖөДРВРНОЮЛрС№ЛхЛг·ЁЈ¬ҝЙУГУЪ№МјюС№ЛхЈ¬ОЮПЯКэҙ«Ј¬КэҫЭБчС№ЛхөИ·ҪПтЎЈ
Ц®З°·ўөДТ»ЖӘЖХј°МщЈәЎҫјјКхМщЎҝҪв¶БSEGGERЧоРВТ»ЖӘІ©ОДЎ¶ККУГУЪMCUөДёЯЧѹЛхЛг·ЁЈ¬DEFLATEЈ¬LZMAЈ¬LZJU90Ј¬LZ4әНSMCSөДРФДЬPKЎ·
http://www.armbbs.cn/forum.php?mod=viewthread&tid=82448&fromuid=58
7ЎўУІјюbugОЮҙҰІ»ФЪЈ¬M7ДЪәЛr0p1°жұҫөДbugТФј°FreeRTOSәНuCOSөДҙҰАн»ъЦЖ
FreeRTOSЈә
There are two options for running FreeRTOS on ARM Cortex-M7 microcontrollers.
The best option depends on the revision of the ARM Cortex-M7 core in use. The
revision is specified by an 'r' number, and a 'p' number, so will look something
like 'r0p1'. Check the documentation for the microcontroller in use to find the
revision of the Cortex-M7 core used in that microcontroller. If in doubt, use
the FreeRTOS port provided specifically for r0p1 revisions, as that can be used
with all core revisions.
The first option is to use the ARM Cortex-M4F port, and the second option is to
use the Cortex-M7 r0p1 port - the latter containing a minor errata workaround.
If the revision of the ARM Cortex-M7 core is not r0p1 then either option can be
used, but it is recommended to use the FreeRTOS ARM Cortex-M4F port located in
the /FreeRTOS/Source/portable/RVDS/ARM_CM4F directory.
If the revision of the ARM Cortex-M7 core is r0p1 then use the FreeRTOS ARM
Cortex-M7 r0p1 port located in the /FreeRTOS/Source/portable/RVDS/ARM_CM7/r0p1
directory.
ТвЛјКЗЛө¶ФУЪr0p1°жұҫөДbugЈ¬УРТ»ёцЧЁГЕөДТЖЦІОДјюЈЁУРТ»ёцОўРЎөДРЮХэЈ©Ј¬өұИ»Ј¬ХвёцОДјюҝЙТФУГУЪЛщУРM7ДЪәЛЈ¬ә¬ТСҫӯҪвҫцҙЛbugөДёЯ°жұҫДЪәЛЎЈ
¶ФУЪёЯ°жұҫM7ДЪәЛЈ¬НЖјцК№УГM4FАпГжөДТЖЦІОДјюЎЈ
uCOSЈә
- ;********************************************************************************************************
- ; HANDLE PendSV EXCEPTION
- ; void OS_CPU_PendSVHandler(void)
- ;
- ; Note(s) : 1) PendSV is used to cause a context switch. This is a recommended method for performing
- ; context switches with Cortex-M. This is because the Cortex-M auto-saves half of the
- ; processor context on any exception, and restores same on return from exception. So only
- ; saving of R4-R11 & R14 is required and fixing up the stack pointers. Using the PendSV exception
- ; this way means that context saving and restoring is identical whether it is initiated from
- ; a thread or occurs due to an interrupt or exception.
- ;
- ; 2) Pseudo-code is:
- ; a) Get the process SP
- ; b) Save remaining regs r4-r11 & r14 on process stack;
- ; c) Save the process SP in its TCB, OSTCBCurPtr->OSTCBStkPtr = SP;
- ; d) Call OSTaskSwHook();
- ; e) Get current high priority, OSPrioCur = OSPrioHighRdy;
- ; f) Get current ready thread TCB, OSTCBCurPtr = OSTCBHighRdyPtr;
- ; g) Get new process SP from TCB, SP = OSTCBHighRdyPtr->OSTCBStkPtr;
- ; h) Restore R4-R11 and R14 from new process stack;
- ; i) Perform exception return which will restore remaining context.
- ;
- ; 3) On entry into PendSV handler:
- ; a) The following have been saved on the process stack (by processor):
- ; xPSR, PC, LR, R12, R0-R3
- ; b) Processor mode is switched to Handler mode (from Thread mode)
- ; c) Stack is Main stack (switched from Process stack)
- ; d) OSTCBCurPtr points to the OS_TCB of the task to suspend
- ; OSTCBHighRdyPtr points to the OS_TCB of the task to resume
- ;
- ; 4) Since PendSV is set to lowest priority in the system (by OSStartHighRdy() above), we
- ; know that it will only be run when no other exception or interrupt is active, and
- ; therefore safe to assume that context being switched out was using the process stack (PSP).
- ;
- ; 5) Increasing priority using a write to BASEPRI does not take effect immediately.
- ; (a) IMPLICATION This erratum means that the instruction after an MSR to boost BASEPRI
- ; might incorrectly be preempted by an insufficient high priority exception.
- ;
- ; (b) WORKAROUND The MSR to boost BASEPRI can be replaced by the following code sequence:
- ;
- ; CPSID i
- ; MSR to BASEPRI
- ; DSB
- ; ISB
- ; CPSIE i
- ;********************************************************************************************************
- OS_CPU_PendSVHandler
- CPSID I ; Cortex-M7 errata notice. See Note #5
- MOV32 R2, OS_KA_BASEPRI_Boundary ; Set BASEPRI priority level required for exception preemption
- LDR R1, [R2]
- MSR BASEPRI, R1
- DSB
- ISB
- CPSIE I
8Ўў»щУЪV7ҝӘ·ў°еөДuCOS-IIIЈ¬uCOS-IIЈ¬RTX4Ј¬RTX5Ј¬FreeRTOSФӯ°жәНҙшCMSIS-RTOS V2·вЧ°Іг°жИ«ІҝјҜЖл
ЈЁ1Ј©Ўў»щУЪV7ҝӘ·ў°еөДЧоРВ°жuCOS-II V2.92.16іМРтДЈ°еЈ¬ә¬MDKәНIARЈ¬Ц§іЦuC/Probe
http://www.armbbs.cn/forum.php?mod=viewthread&tid=93552
ЈЁ2Ј©Ўў»щУЪV7ҝӘ·ў°еөДЧоРВ°жuCOS-III V3.07.03іМРтДЈ°еЈ¬ә¬MDKәНIARЈ¬Ц§іЦuC/ProbeЈ¬УлЦ®З°°жұҫұд»ҜҪПҙу
http://www.armbbs.cn/forum.php?mod=viewthread&tid=93553
ЈЁ3Ј©Ўў»щУЪV7ҝӘ·ў°еөДЧоРВ°жFreeRTOS V10.2.0іМРтДЈ°еЈ¬ә¬MDKәНIARЈ¬Ц§іЦҙ®ҝЪҙтУЎИООсЦҙРРЗйҝц
http://www.armbbs.cn/forum.php?mod=viewthread&tid=93554
ЈЁ4Ј©Ўў»щУЪV7ҝӘ·ў°еөДЧоРВ°жRTX4 V4.81.1іМРтДЈ°еЈ¬І»К№УГCMSIS-RTOS·вЧ°ІгЈ¬јМРшұЈіЦі¬ЗҝХҪ¶·БҰ
http://www.armbbs.cn/forum.php?mod=viewthread&tid=93555
ЈЁ5Ј©Ўў»щУЪV7ҝӘ·ў°еөДRTX5әНFreeRTOSҙшCMSIS-RTOS V2·вЧ°ІгөДДЈ°еАэіМПВФШЈ¬AC6әНAC5БҪёц°жұҫ
http://www.armbbs.cn/forum.php?mod=viewthread&tid=93238
ХвАпЦчТӘЧўТвuCOS-IIIЈ¬УлЦ®З°°жұҫУРҪПҙуөДұд»ҜЎЈ
ТЖЦІЛөГчИзПВЈә
ЈЁ1Ј©ЎўMDKК№УГMDK5.26ј°ЖдТФЙП°жұҫЎЈ
ЈЁ2Ј©ЎўIARК№УГIAR8.30ј°ЖдТФЙП°жұҫЎЈ
ЈЁ3Ј©ЎўУЙУЪMirciumөұЗ°ҪцМṩБЛIARөДөЧІгТЖЦІОДјюЈ¬ІОҝјРЮёДЦЖЧчБЛёцMDK°жұҫөДЎЈ
ЈЁ4Ј©ЎўРВ°жөДөЧІгТЖЦІОДјюұИҪПәГУГЈ¬Ц§іЦM3Ј¬M4әНM7Ј¬ә¬ёЎөгЦ§іЦЎЈ
ЈЁ5Ј©ЎўЦЖЧчБЛТ»ёцөОҙр¶ЁКұЖчәНPendSVЦР¶ПИлҝЪ»гұаОДјюos_cpu_isr.asmЈ¬ТФәуІ»УГ·ұЛцөДРЮёДЖф¶ҜОДјюөДЦР¶ПИлҝЪәҜКэГыЈ¬ЦұҪУМнјУҙЛМщОДјюјҙҝЙЎЈ
ЈЁ6Ј©ЎўРВ°жөДЦР¶П№ЬАн·ЦОӘKernel AwareәНNon-Kernel Aware
Kernel Aware ұнКҫКЬөҪuCOS-III№ЬАнөДЦР¶П·юОсіМРтЎЈ
Non-Kernel Aware ұнКҫІ»КЬ№ЬАнөДЦР¶П·юОсіМРтЈ¬ЦР¶ПК№УГёъВг»ъТ»СщЈ¬ө«І»ҝЙөчУГuCOS-IIIөДAPIЎЈ
ЈЁ7Ј©ЎўuCOS-IIIҪшИлV3.07.00°жұҫәуУлЦ®З°өД°жұҫұд»ҜҪПҙуЈ¬И·ЗРөДЛөКЗёьәГУГБЛЎЈРВөДДЪәЛІҝ·ЦФҪАҙФҪПтuCOS-IIҝҝВЈЈ¬Ц®З°У·ЦЧөД№ҰДЬәНІ»әПАн·Ҫ°ё¶јТСҫӯ·ЕЖъЎЈ
uCOS-IIIёХНЖіцөДКұәтЈ¬ёгБЛІ»ЙЩ№ҰДЬЈ¬КІГҙЦР¶ПСУіЩМбҪ»Ј¬¶аКВјюөИҙэЈ¬ЧЁГЕёгТ»ёцөОҙр¶ЁКұЖчИООсөИРВ№ҰДЬЎЈЙэј¶өҪөұЗ°өДV3.07.00ә󣬶јұ»ёЙөфБЛЈ¬І»КөУГЎЈ
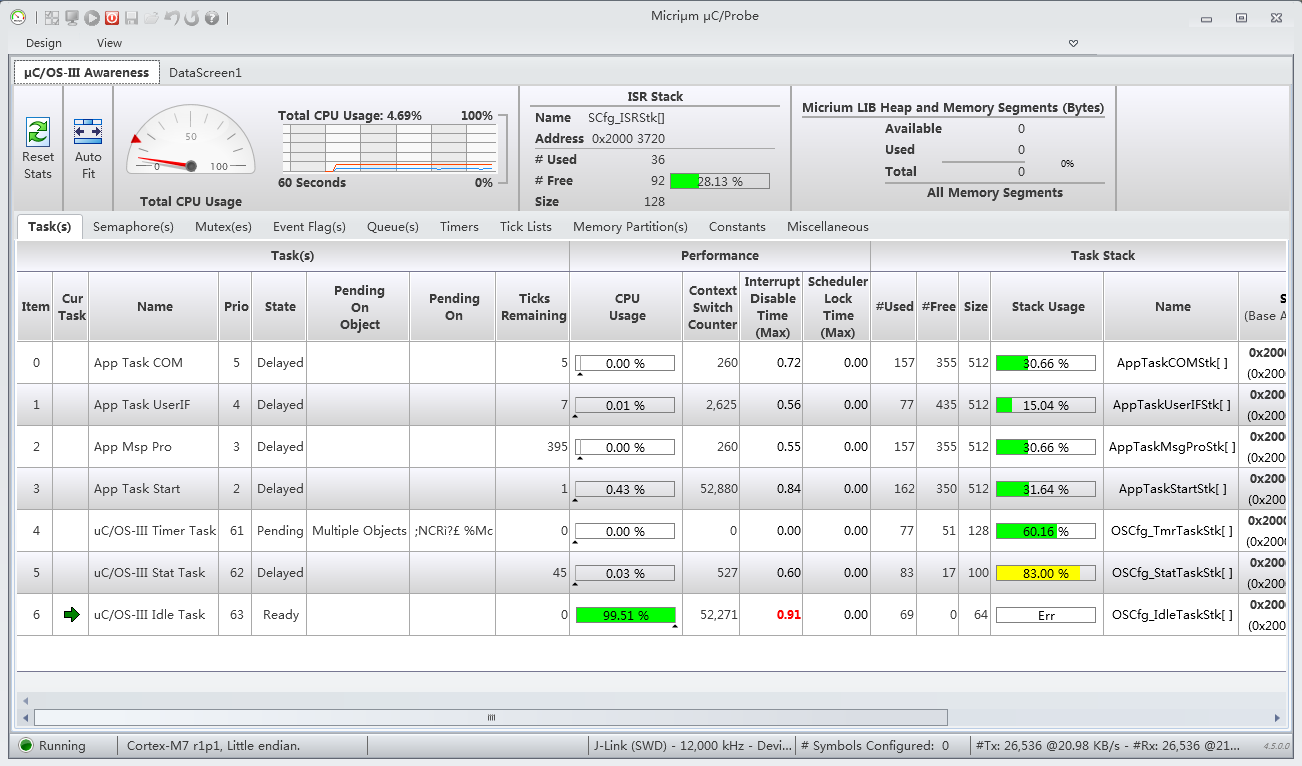
РВ°жuCOS-III V3.07.03өД¶ҜМ¬КұЦУДЈКҪФЪSTM32H7ЙПГжТІІвКФіЙ№ҰЈ¬өДИ·КЗ·ЗіЈЛ¬өДТ»ЦЦ·ҪКҪЈ¬ПВЦЬТ»·ЦПнёшҙујТЎЈ
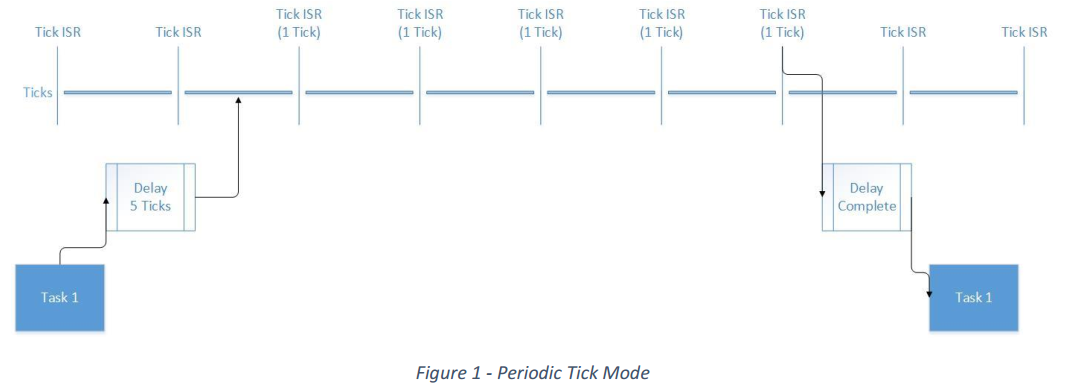
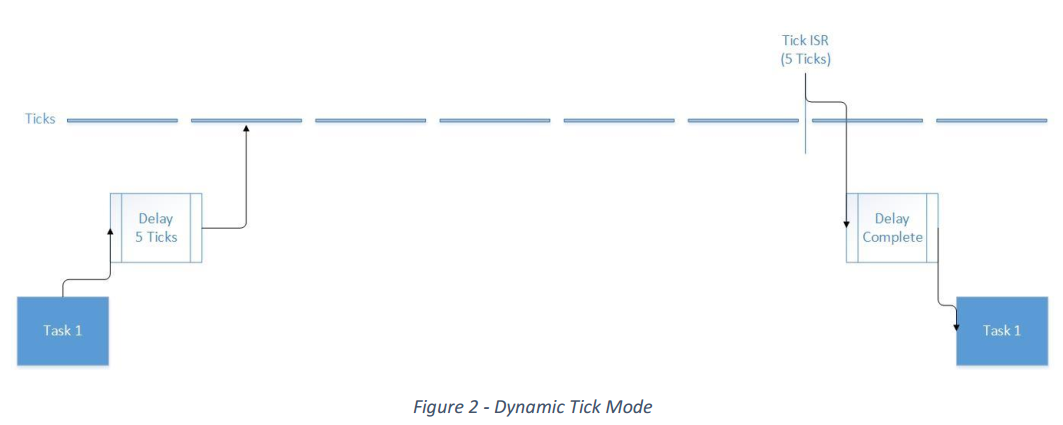
ХвАпөД¶ҜМ¬өОҙрДЈКҪАаЛЖRTXЈ¬FreeRTOSөДticklessЈ¬¶јКЗУГУЪөН№ҰәДөДЎЈ
ХэіЈөОҙрәН¶ҜМ¬өОҙрөДР§№ы¶ФұИЈә
|
ЖА·Ц
-
ІйҝҙИ«ІҝЖА·Ц
|








 ·ўұнУЪ 2019-5-5 02:34:58
·ўұнУЪ 2019-5-5 02:34:58
 ВҘЦч
ВҘЦч
 ·ўұнУЪ 2019-5-5 08:43:10
·ўұнУЪ 2019-5-5 08:43:10



{kind=link}
{kind=link}